谐响应分析
谐响应分析是工程领域中用于研究结构或系统在周期性激励下的动态响应的一种分析方法。在进行谐响应分析时,首先需要确定系统的固有频率和阻尼比等参数,然后将这些参数代入系统的动力方程中,通过计算得到结构在周期性。
常见的周期性激励包括周期性力、振动台的振动等。谐响应分析可以帮助工程师理解结构在周期性激励下的振动情况,例如桥梁在车辆通过时的振动、建筑物在风荷载作用下的振动等。通过谐响应分析,工程师可以评估结构的稳定性和安全性,并且指导结构的设计和改进。
使用CAE365网站,我们可以通过下面的几个步骤轻松开启谐响应仿真
进入CAE365网站

在页面下方模块栏中选择结构仿真-谐响应分析,点击开始仿真按钮,开始仿真:
在弹出的创建工程窗口中输入工程名:
输入工程名称后,点击创建,进入谐响应仿真界面:
谐响应仿真模块树如图所示:
1. 产品手册
1.1 几何导入
用户可以在这里上传几何模型,模型格式建议为iges、step、brep、xao且大小不超过200M。
1.1.1 几何分组
用户可以在几何模型中创建点、线、面、体的分组。
1.2 网格导入
用户可通过点击网格,导入本地网格,格式建议为,med、inp、cdb、cgns且大小不超过200M。用户需预先把所需的载荷组与约束组定义完整,否则在后续的仿真分析中不能选择未定义组的点、线、面和体。 同时可以在此选项按照平台内置算法划分网格。
1.3 兴趣点设置
在此选项卡中,用户可定义兴趣点,以便在后续的结果展示中可直接查看兴趣点的计算结果。
1.4 线性接触
在模型建立时没有进行融合操作的结构都需要对其进行接触设置。线性接触指两个物体表面之间没有相对滑移,并且满足胡克定律,即力与位移成正比。
在此选项卡中,用户可选择绑定、相对滑动两种连接方法,并自定义接触位置和位置容差。
1.5 单元设置
在此选项卡中,可手动或自动选择设置三维完全积分单元或者三维缩减积分单元类型,以及网格阶数为一阶或者二阶。
1.6 材料设置
在此选项卡中,用户可选择大部分常用材料(如钢、铁、铝、玻璃、橡胶、陶瓷等金属和非金属材料),材料包含基础的力学特征,如本构行为、密度、泊松比、杨氏模量等。
1.7 边界条件
在此选项卡中,用户可选择边界条件、加载方式和施加位置;
边界条件包括:固定支撑、弹性支撑、位移约束、对称约束、附加质量;
加载方式包括:面分布载荷、体分布载荷、压强、面力载荷、离心力载荷、离散点绑定位移、离散点绑定力、基础激励。
1.8 求解器
在此选项卡中,用户可根据自己的需要对求解器进行个性化选择与设置,以满足计算需求。用户可在求解器中选择不同的计算方法,选择不同的迭代方法和收敛准则。
1.9 时间步&资源
用户可设置计算的核数以及最大计算时间。
1.10 结果配置
1.10.1 物理场
在此选项卡中,用户可根据需要选择特定的输出结果,包括位移、应力(柯西应力、冯米塞斯应力)、应变、力(节点力、节点反力)、速度、加速度,结果以云图方式展示。
1.10.2 兴趣点
在此选项中用户可以激活前面设置的兴趣点,并选择该点所对应的物理量。
1.11 仿真计算
当前面的所有设置均已完善后可在此处提交计算。
2. 教程案例
3. 设置项详解
3.1 几何
用户可从本地上传几何文件,上传后选项卡会展示几何外形,显示顶点数量、边线数量、环线数量和面数量等。
- 几何分组:上传几何文件后,用户需对几何进行分组,以便在后续的仿真分析中选择所需的点、线和面。不分组自动画网格功能不能使用!
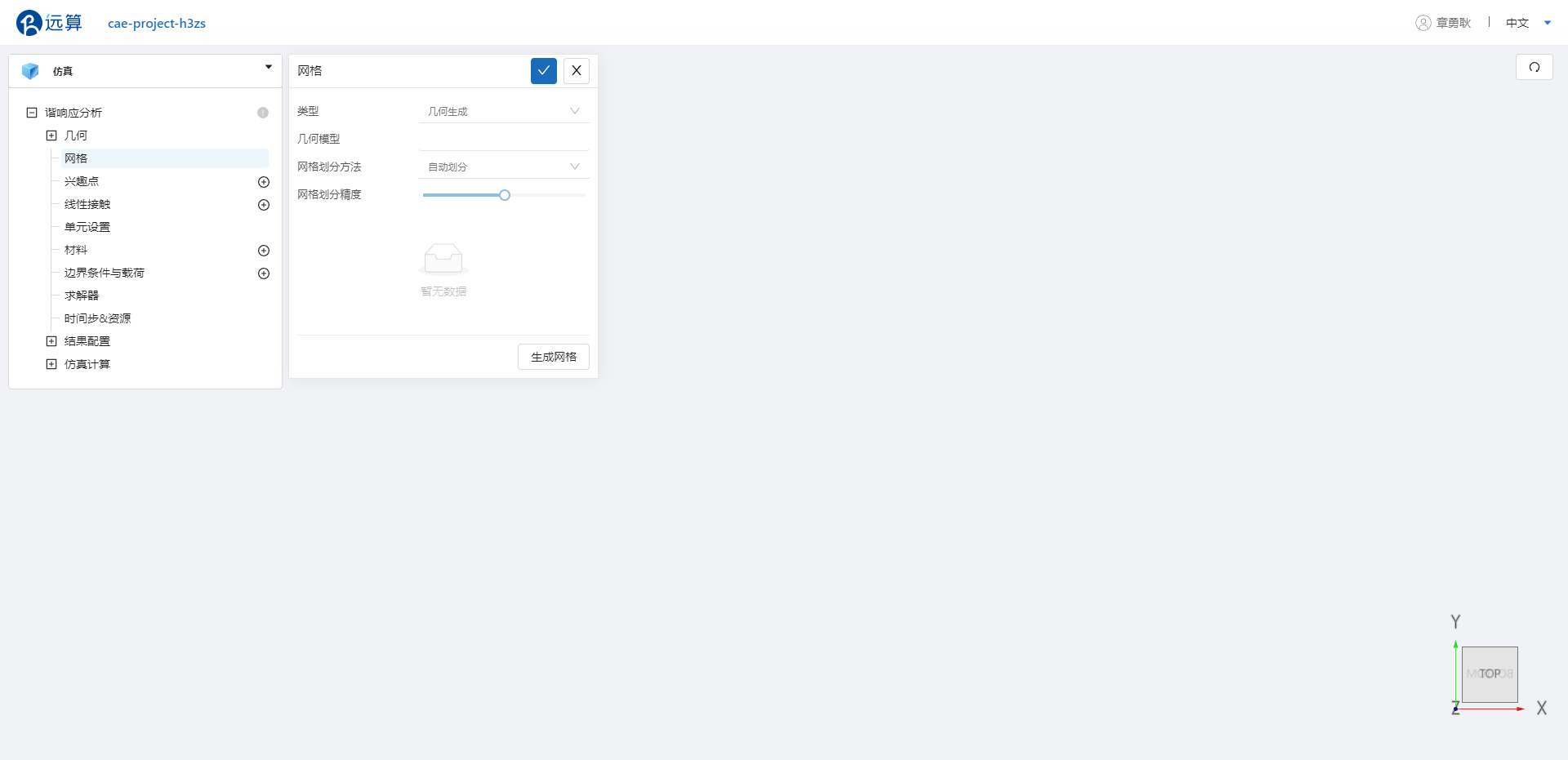
3.2 网格
用户可从本地上传网格文件,上传后选项卡会展示网格外形,显示单元数量、节点数量、边线数量和面数量等。上传网格文件前,用户需提前对模型进行分组,以便在后续的仿真分析中选择所需的点、线和面。
用户也可将上传的几何文件在此处划分网格,生成.med文件。
- 类型:在此处选择用于计算的网格来源
- 几何生成:将上传的几何文件剖分
- 上传网格:直接导入外部网格模型
- 几何模型:当类型处选择“几何生成”时,此处默认的是导入几何的文件名。
- 网格划分方法:此处选择划分网格的算法。
- 自动划分:平台自动生成四面体网格,只能调节网格密度。
- 手动划分:可以调节网格的单元最大最小尺寸以及网格密度
- 网格划分精度:控制网格密度的滑块,0代表网格最粗糙,4代表网格最精细。
- 单元最大尺寸:手动划分时,用户可以自定义单元的最大长度。
- 单元最小尺寸:手动划分时,用户可以自定义单元的最小长度。
3.3 兴趣点
用户可在模型上选择兴趣点,以便在后续的结果展示中以列表形式查看兴趣点的结果。
- 点:通过三个坐标定义一个点。
- 球:通过三个坐标和半径定义一个球。
- 圆柱:可以设置半径、参考点坐标、坐标原点坐标。
- 笛卡尔盒子:可以设置最小值和最大值坐标。
3.4 线性接触
- 连接方法
- 绑定:通过约束条件将两个物体或结构件紧密连接在一起,使其在仿真分析过程中保持稳定的相对位置和运动关系。
- 相对滑动:许两个接触面在接触表面相切的平面上有位移,但不允许沿接触面法线方向有位移。
- 位置容差:从属面距主从面最近的距离,该选项会改变接触的区域大小。
- 启用
- 不启用
- 容差:启用位置容差后可在此处设置容差数值,用户自定义的浮点数。
- 主接触面位置:在选择主接触面时,必须选择体单元类型!!!
- 从接触面位置:从接触面选择另一个接触面。
3.5 单元设置
当单元设置为“自动”时,默认选择二阶、三维完全积分单元;当设置为“手动”时,用户可选择三维完全积分单元或三维缩减积分单元;当单元设置为“手动”时,用户可选择一阶或者二阶网格;
- 单元设置:
- 自动
- 手动
- 单元类型
- 三维完全积分单元
- 三维缩减积分单元
- 网格阶数
- 一阶
- 二阶
3.6 材料
材料选项卡中用户可定义全局的材料性能,包括材料本构行为(默认线弹性),杨氏模量、泊松比、密度,单位也可根据需要随时改变。
点击材料的加号按钮,用户可选择内置的不同材料,各项材料力学基本属性都已默认填写,同时可根据用户需要赋予所属模型网格。
3.7 边界条件
边界条件定义了结构的支撑情况和结构与外部环境的相互作用,点击边界条件与载荷旁的加号按钮可选择不同的边界类型:
-
面分布载荷
- 边界类型:面分布载荷
- 面分布载荷:用户可在此处自定义三个方向的分量值,数值可通过直接输入值、表格输入、公式输入三种方式输入;
- 放缩系数:将载荷大小进行放缩。
- 相位角:用户自定义浮点数。
- 施加位置:选取载荷所作用的位置。
-
固定支撑
用户可在该选项卡中选择需要的体、面、线、点,施加6个自由度方向的固定约束; -
体分布载荷
- 边界类型:体分布载荷
- 体分布载荷:用户可在此处自定义三个方向的分量值,数值可通过直接输入值、表格输入、公式输入三种方式输入;
- 放缩系数:将载荷大小进行放缩。
- 相位角:用户自定义浮点数。
- 施加位置:选取载荷所作用的位置。
-
弹性支撑
- 边界类型:弹性支撑
- 弹簧刚度
- 各向同性:各个方向的刚度一致,一个变量即可表示弹簧刚度。
- 各向异性:三个方向的刚度不一定一致,需要3个变量表示弹簧的刚度。
- 刚度定义
- 整体模型:定义的刚度值将应用于面的所有节点;
- 分布模型:刚度将分布到应用刚度的面区域;
- K
- x:用户自定义数值,表示X方向的刚度大小。
- y:用户自定义数值,表示Y方向的刚度大小。
- z:用户自定义数值,表示Z方向的刚度大小。
- 施加位置:选取边界所作用的位置。
-
位移约束
用户可在该选项卡中选择需要的体、面、线、点,施加3个平动自由度的位移,可通过勾选对应方向的选择框来自由选择所需方向的位移条件,数值可通过直接输入值、表格输入、函数输入三种方式输入; -
对称约束
用户可在该选项卡中选择需要的面,该平面作为结构的对称平面; -
压强
- 边界类型:压强
- 压强:用户可在该选项卡中选择需要的面单元施加压强,压强方向默认为施加平面的内法线方向,数值可通过直接输入值、表格输入、函数输入三种方式输入;
- 相位角:有用户自定义一个浮点数。
- 施加位置:荷载所作用的位置。
-
面力载荷
- 边界类型:面力荷载
- 面力荷载:用户可在此处自定义三个方向的分量值,数值可通过直接输入值、表格输入、公式输入三种方式输入;
- 放缩系数:将载荷大小进行放缩。
- 相位角:用户自定义浮点数。
- 施加位置:选取载荷所作用的位置。
-
离心力载荷
用户可在该选项卡中施加结构绕固定轴旋转时的力,该载荷施加需要定义三个参数:旋转轴的位置、旋转轴的方向、转速;- 边界类型:离心力载荷
- 轴上的点:旋转轴的位置通过“轴上的点”定义,需要在全局坐标系下定义1个点。
- 旋转轴:旋转轴的方向需要在全局坐标系下定义方向向量;
- 转速 转速可通过直接输入值、表格输入两种方式输入;
- 施加位置:选取载荷所作用的位置
-
附加质量
用户可在该选项卡中施加1个有质量的点,该点与选定的施加位置用远程连接,定义附加质量时需要定义质量点的质量、位置(全局坐标系下的坐标);- 边界类型:附加质量
- 质量:由用户自定义数值表示质量的大小。
- 质量惯性矩:定义质量点的惯性矩性质。
- 外部节点:定义质量点的坐标。
- 形变行为
- 可形变:质量点和施加位置之间为柔性连接;
- 不可形变:质量点和施加位置之间为刚性连接;
- 施加位置:荷载所作用的位置,可以选择体、面、线、点;
-
离散点绑定位移
用户可在该选项卡中选择需要的面或体,施加远程位移边界条件,该边界条件需要定义四个参数:位移、旋转、外部节点、形变行为;- 边界类型:离散点绑定位移
- 位移:可勾选对应方向的选择框来自由选择所需方向的位移约束,数值可通过直接输入值、表格输入、函数输入三种方式输入;
- 外部节点:输入在全局坐标系下外部节点的坐标;
- 旋转:可勾选对应方向的选择框来自由选择所需方向的旋转约束,数值可通过直接输入值、表格输入、函数输入三种方式输入;
- 形变行为
- 可形变:外部节点和施加位置之间为柔性连接;
- 不可形变:外部节点和施加位置之间为刚性连接。
- 施加位置:荷载所作用的位置。
-
离散点绑定力
用户可在该选项卡中选择从远程点向结构的面施加力矢量,该选项需要定义三个参数:绑定力、力矩、外部节点(远程点);- 绑定力:输入全局坐标系下的3个方向的力分量,数值可通过直接输入值、表格输入、函数输入三种方式输入;
- 力矩:输入全局坐标系下的3个方向的力矩分量,数值可通过直接输入值、表格输入、函数输入三种方式输入;
- 外部节点:输入在全局坐标系下远程点的坐标;
- 形变行为
- 可形变:外部节点和施加位置之间为柔性连接;
- 不可形变:外部节点和施加位置之间为刚性连接。
- 施加位置:荷载所作用的位置。
-
基础激励
用户可在该选项卡中施加全局坐标系下的3个方向的加速度激励,数值可通过直接输入值、表格输入两种方式输入;需要注意的是,基础激励必须要先设置固定支撑,且不兼容力边界条件;- 方向:通过向量的方式确定激励的方向。
- 加速度:由用户自定义一个浮点数,用来表示激励的大小。
- 相位角 :由用户自定义一个浮点数。
3.8 求解器
求解器面板包含控制有限元分析求解方程的一些设置,包括算法选择、矩阵奇异性检测等方案,以下会对每种设置及其过程机械阐述,这些参数在大多数情况下都足够好,但用户可利用可选项来优化计算过程,提高速度、鲁棒性和精度。求解计算方法包含MUMPS、LDLT、Multifrontal三种方法;
-
MUMPS:多用于大规模稀疏矩阵的直接求解,该选项卡有自己的一些特定设置;
- 奇异性监测精度:设置矩阵奇异性评估的数值精度,如果设置负值则关闭监测;
- 矩阵类型
- 自动检测
- 非对称矩阵
- 对称不定矩阵
- 对称正定矩阵;
- 矩阵优化内存分配率:用于数据透视操作估计量之上保留的内存比例设定;
- 是否进行预处理:可选择是否启用矩阵的预分析用以优化计算;
- 矩阵重新编号方法:矩阵优化算法,对仿真计算的内存消耗有巨大影响;
- AMD:使用近似最小度数方法;
- SCOTCH:是一个强大的重新编号工具,适用于大多数场景,是MUMPS的标准选项;
- AMF:使用近似最小填充方法;
- PORD:是MUMPS中包含的重新编号工具;
- QAMD:是自动检测准密集矩阵的AMD变体;
- Automatic: MUMPS自动选择重新编号的方法;
- 内存管理优先级:允许选择RAM与磁盘的使用情况;
- 自动:允许求解器决定最佳设置;
- 核内存储:通过将所有对象存储在内存中,优化计算时间;
- 评估:在求解器日志中提供最佳设置;
- 核外存储:通过在内存外存储对象来优化内存使用。
-
LDLT:对系数矩阵执行经典的高斯消去过程
- 奇异性检测精度:设置矩阵奇异性评估的数值精度,如果设置负值则关闭监测
-
MULTIFRONTAL:系数矩阵分解法对矩阵进行LU或Cholesky分解,该方法的矩阵重新编号方法有两种方法
- 奇异性检测精度:设置矩阵奇异性评估的数值精度,如果设置负值则关闭监测
- 矩阵重新编号方法
- MDA:对超过5000或者更大自由度的大模型选择此选项
- MD:小模型选择此选项
3.9 时间步&资源
在此选项卡中,用户可设定计算所需的资源和计算时间和激励的频率;
- 激励频率
- 固定频率:在在设定的频率下对模型激励
- 频率:用户自定义浮点数。
- 频率列表:用户可以定义一个区间内的频率对模型激励。
- 起始频率:由用户自定义浮点数,频率的起始值。
- 结束频率:由用户自定义浮点数,频率的结束值,数值上应大于起始频率。
- 频率步进:搜索频率时的步长,由用户自定义。
- 固定频率:在在设定的频率下对模型激励
- 计算核数:定义仿真计算所需的计算核数;
- 最大计算时间:定义仿真的最大时间,超过该值就会自动停止计算。
3.10 结果配置
在此选项卡中,用户可输出响应的结果;
- 物理场:可选择输出结果,包括位移、应力(柯西应力、冯米塞斯应力)、应变、力(节点力、节点反力)、速度、加速度,其中位移场、柯西应力场、应变场、速度场和加速度场的复数形式可以选择“实数和复数”或“模与相位”;
- 兴趣点结果提取:以列表形式展示之前所选兴趣点的结果。
3.11 仿真计算
用户可在此选项卡中提交计算并查看仿真计算之后的云图,还可获得计算日志,便于用户的使用。