动力学
动力学仿真是一种将有限元分析技术应用于模拟物体或系统在时间和空间上的动态行为的方法。它结合了有限元分析(Finite Element Analysis, FEA)和动力学分析的技术,用于研究和预测物体在外部作用力下的运动和相互作用。可以帮助工程师和科学家理解和预测复杂系统的动态行为,优化设计方案,并解决实际工程和科学问题。
进入CAE365网站,我们可以通过下面的几个步骤轻松开启动力学仿真
进入CAE365网站

在页面下方模块栏中选择CAE产品-动力学分析,点击开始仿真按钮,开始仿真:
在弹出的创建工程窗口中输入工程名:

输入工程名称后,点击创建,进入动力学仿真界面:
动力学仿真模块树如图所示:
1. 产品手册
1.1 几何导入
用户可以在这里上传几何模型,模型格式建议为iges、step、brep、xao且大小不超过200M。
1.1.1 几何分组
用户可以在几何模型中创建点、线、面、体的分组。
1.2 网格导入
用户可通过点击网格,导入本地网格,格式建议为,med、inp、cdb、cgns且大小不超过200M。用户需预先把所需的载荷组与约束组定义完整,否则在后续的仿真分析中不能选择未定义组的点、线、面和体。 同时可以在此选项按照平台内置算法划分网格。
1.3 兴趣点设置
在此选项卡中,用户可定义兴趣点,以便在后续的结果展示中可直接查看兴趣点的计算结果。
1.4 线性接触
在模型建立时没有进行融合操作的结构都需要对其进行接触设置。线性接触指两个物体表面之间没有相对滑移,并且满足胡克定律,即力与位移成正比。
在此选项卡中,用户可选择绑定、相对滑动两种连接方法,并自定义接触位置和位置容差。
1.5 单元设置
在此选项卡中,可手动或自动选择设置三维完全积分单元或者三维缩减积分单元类型,以及网格阶数为一阶或者二阶。
1.6 材料设置
在此选项卡可选择大部分常用材料(如钢、铁、铝、玻璃、橡胶、陶瓷等金属和非金属材料),材料包含各自基础的力学特征,包含本构行为、密度、泊松比、杨氏模量等。
1.7 边界条件与载荷
用户可在边界条件与载荷选项卡中选择约束类型(固定支撑、位移约束、对称约束)和载荷类型(压强、面分布荷载、节点力载荷)。
1.8 仿真控制
在此选项卡中,用户可根据自己的需要对求解器进行个性化选择与设置,以满足计算需求。
1.8.1 求解器设置
用户可在求解器中选择不同的计算方法,选择不同的迭代方法和收敛准则。
1.8.2 动力学分析设置
在此选项卡主要可以设置动力学计算空间,包括物理空间和模态空间,同时可以设置动力学计算的时间增量和积分方法以及阻尼类型相关参数。
1.9 时间步&资源
可设置计算的核数以及最大计算时间。
1.10 结果配置
1.10.1 物理场
在此选项卡中,用户可根据需要选择特定的输出结果,包括位移、应力(柯西应力、冯米塞斯应力)、应变、力(节点力、节点反力)、速度、加速度,结果以云图方式展示。
1.10.2 兴趣点
在此选项中用户可以激活前面设置的兴趣点,并选择该点所对应的物理量。
1.11 仿真计算
当前面的所有设置均已完善后可在此处提交计算。
2. 教程案例
3. 设置项详解
3.1 几何
用户可从本地上传几何文件,上传后选项卡会展示几何外形,显示顶点数量、边线数量、环线数量和面数量等。
- 几何分组:上传几何文件后,用户需对几何进行分组,以便在后续的仿真分析中选择所需的点、线和面。不分组自动画网格功能不能使用!
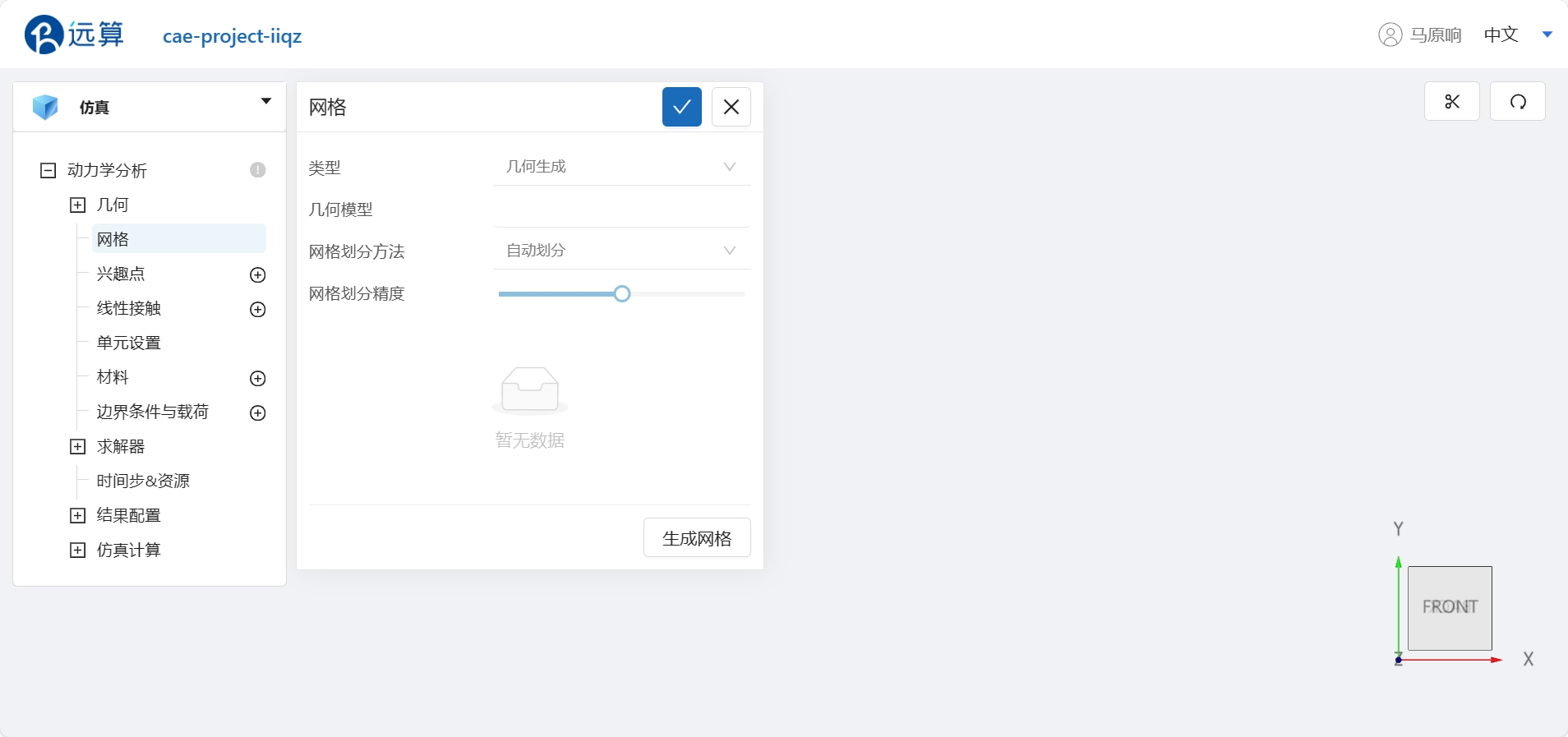
3.2 网格
用户可从本地上传网格文件,上传后选项卡会展示网格外形,显示单元数量、节点数量、边线数量和面数量等。上传网格文件前,用户需提前对模型进行分组,以便在后续的仿真分析中选择所需的点、线和面。
用户也可将上传的几何文件在此处划分网格,生成.med文件。
- 类型:在此处选择用于计算的网格来源
- 几何生成:将上传的几何文件剖分
- 上传网格:直接导入外部网格模型
- 几何模型:当类型处选择“几何生成”时,此处默认的是导入几何的文件名。
- 网格划分方法:此处选择划分网格的算法。
- 自动划分:平台自动生成四面体网格,只能调节网格密度。
- 手动划分:可以调节网格的单元最大最小尺寸以及网格密度
- 网格划分精度:控制网格密度的滑块,0代表网格最粗糙,4代表网格最精细。
- 单元最大尺寸:手动划分时,用户可以自定义单元的最大长度。
- 单元最小尺寸:手动划分时,用户可以自定义单元的最小长度。
3.3 兴趣点
用户可在模型上选择兴趣点,以便在后续的结果展示中以列表形式查看兴趣点的结果。
- 点:通过三个坐标定义一个点。
- 球:通过三个坐标和半径定义一个球。
- 圆柱:可以设置半径、参考点坐标、坐标原点坐标。
- 笛卡尔盒子:可以设置最小值和最大值坐标。
3.4 线性接触
- 连接方法
- 绑定:通过约束条件将两个物体或结构件紧密连接在一起,使其在仿真分析过程中保持稳定的相对位置和运动关系。
- 相对滑动:许两个接触面在接触表面相切的平面上有位移,但不允许沿接触面法线方向有位移。
- 位置容差:从属面距主从面最近的距离,该选项会改变接触的区域大小。
- 启用
- 不启用
- 容差:启用位置容差后可在此处设置容差数值,用户自定义的浮点数。
- 主接触面位置:在选择主接触面时,必须选择体单元类型!!!
- 从接触面位置:从接触面选择另一个接触面。
3.5 单元设置
当单元设置为“自动”时,默认选择二阶、三维完全积分单元;当设置为“手动”时,用户可选择三维完全积分单元或三维缩减积分单元;当单元设置为“手动”时,用户可选择一阶或者二阶网格;
- 单元设置:
- 自动
- 手动
- 单元类型
- 三维完全积分单元
- 三维缩减积分单元
- 网格阶数
- 一阶
- 二阶
3.6 材料
材料选项卡中用户可定义全局的材料性能,包括材料本构行为(默认线弹性),杨氏模量、泊松比、密度,单位也可根据需要随时改变。
点击材料的加号按钮,用户可选择内置的不同材料,各项材料力学基本属性都已默认填写,同时可根据用户需要赋予所属模型网格。
3.7 边界条件与载荷
边界条件与载荷定义了系统与环境交互的方式,一般的,边界条件与载荷由三部分组成:边界类型、边界施加位置、边界条件值。
点击边界条件与载荷后的加号按钮可选择不同的边界条件;
- 面分布载荷:
- 边界类型:面分布载荷
- 面分布载荷设置:设定全局坐标系下的三个载荷分量,载荷可通过表格输入、公式输入两种方式输入。
- 时间乘子:设置荷载与时间的关系
- 施加位置:添加荷载的作用位置
- 压强:
- 边界类型:压强
- 压强设置:数值可通过表格输入、函数输入两种种方式输入。
- 时间乘子:设置载荷与时间的关系
- 施加位置:添加荷载的作用位置
- 节点力载荷
- 边界类型:节点力载荷
- 节点力设置:设定全局坐标系下的三个节点力载荷分量,载荷可通过表格输入、公式输入两种方式输入。
- 时间乘子:设置荷载与时间的关系
- 施加位置:添加荷载的作用位置
- 固定支撑:用户可在该选项卡中选择对应的体、面、线、点施加6个自由度方向的固定约束。
- 位移约束:用户可在该选项卡中选择对应的体、面、线、点施加3个平动自由度的位移,用户可通过勾选对应方向的选择框来自由选择所需方向的位移条件,数值可通过直接输入值、表格输入、函数输入三种方式输入。
- 对称约束:用户可在该选项卡中选择对应的面,该平面作为结构的对称平面。
3.8 求解器
3.8.1 求解器设置
求解器面板包含控制有限元动力学分析求解模型的方程求解器的一些设置,这些参数在大多数情况下都足够好,但用户可利用可选项来优化计算过程,提高速度、鲁棒性和精度。求解计算方法包含:MUMPS,LDLT,Multifrontal三种方法。
MUMPS:多用于大规模稀疏矩阵的直接求解,该选项卡有自己的一些特定设置
- 矩阵优化内存分配率:用于数据透视操作估计量之上保留的内存比例设定
- 奇异性检测精度:设置矩阵奇异性评估的数值精度,如果设置负值则关闭监测
- 矩阵类型:分为自动检测、非对称矩阵、对称不定矩阵、对称正定矩阵
- 是否进行预处理:用户可选择是否启用矩阵的预分析用以优化计算
- 矩阵重新编号方法:矩阵优化算法,对仿真计算的内存消耗有巨大影响:
- AMD:使用近似最小度数方法
- SCOTCH:是一个强大的重新编号工具,适用于大多数场景,是MUMPS的标准选项
- AMF:使用近似最小填充方法
- PORD:是MUMPS中包含的重新编号工具
- QAMD:是自动检测准密集矩阵的AMD变体。
- Automatic: MUMPS自动选择重新编号的方法
- 内存管理优先级:允许选择RAM与磁盘的使用情况
- 自动:允许求解器决定最佳设置
- 核内存储:通过将所有对象存储在内存中,优化计算时间。
- 预估:在求解器日志中提供最佳设置
- 核外存储:通过在内存外存储对象来优化内存使用
LDLT:对系数矩阵执行经典的高斯消去过程
- 奇异性检测精度:设置矩阵奇异性评估的数值精度,如果设置负值则关闭监测
MULTIFRONTAL:系数矩阵分解法对矩阵进行LU或Cholesky分解,该方法的矩阵重新编号方法有两种方法
- 奇异性检测精度:设置矩阵奇异性评估的数值精度,如果设置负值则关闭监测
- 矩阵重新编号方法
- MDA:对超过5000或者更大自由度的大模型选择此选项
- MD:小模型选择此选项
3.8.2 动力学分析设置
用户在此选项卡可以设置动力学分析的相关设置。
- 计算空间
- 物理空间:物理空间是描述物体运动状态、受力情况和碰撞等物理现象的基本框架。
- 模态空间:模态空间则是指用模态来表征的模态坐标空间。具体来说,当对物理空间上的运动方程进行特征值求解和模态变换方程时,可以将这组物理空间上耦合的方程进行解耦,解耦后的方程为一组单自由度系统的运动方程,此时转换后的新坐标系统,就称为模态空间。模态空间使得我们更易于用单自由度系统去描述结构系统。
- 时间增量
- 终止时间:需用户设置一个浮点数,用来限制动力学计算的最大时间。
- 时间步长:需用户设置一个浮点数,此处数值应比终止时间设置的数值小。用来定义在仿真计算时的时间间隔,设置过大计算不易收敛,设置过小会消耗大量计算资源。
- 时间积分方法
- NEWMARK:NEWMARK时间积分方法是一种逐步积分的方法,用于在动力学仿真中求解结构的动态响应。这种方法避免了任何叠加的应用,能够很好地适应非线性的反应分析。NEWMARK时间积分方法假定在一个时间步长内,加速度和速度的变化规律是已知的,然后根据这些假设和初始条件,通过迭代计算来更新速度和位移。
- BETA:该参数在求位移的时候起作用,用于控制位移的计算。当β取值为0时,也对应的是显式中心差分方案。而当β取值为0.25时,相当于假定在各时间步距内加速度反应为常数,其取值为步距始、末两点加速度反应的平均值。
- GAMMA:该参数主要用于控制速度的计算。当γ取值为0.5时,对应的是显式中心差分方案,此时获得的是平均恒定加速度(中点规则)。通过选取不同的γ值,会形成不同的数值求解方法。
- WILSON:WILSON时间积分方法(也称为Wilson-θ方法) 是一种隐式的数值积分方法,用于求解结构动力学中的运动方程。
- Theta:一个大于1的参数(通常取值为1.3-1.5),使得在θΔt的时间间隔内,加速度假设为线性变化的。这个假设使得Wilson-θ方法具有无条件稳定的特性,也就是说,无论时间步长Δt取何值,方法都是稳定的。
- NEWMARK:NEWMARK时间积分方法是一种逐步积分的方法,用于在动力学仿真中求解结构的动态响应。这种方法避免了任何叠加的应用,能够很好地适应非线性的反应分析。NEWMARK时间积分方法假定在一个时间步长内,加速度和速度的变化规律是已知的,然后根据这些假设和初始条件,通过迭代计算来更新速度和位移。
- 阻尼设置:可以由用户决定是否考虑阻尼影响。
- 瑞利阻尼:瑞利阻尼(Rayleigh Damping) 是一种在结构动力学分析中常用的阻尼模型,用于模拟结构的阻尼效应。其模型简单且易于实现,因此在许多工程应用中得到了广泛应用。然而,它也有一些局限性,比如不能准确地模拟所有类型的阻尼效应,特别是当结构具有复杂的阻尼特性时。
- 刚度阻尼系数:用户需要设置一个浮点数,此数值是计算瑞利阻尼的必要参数。建议使用默认值。
- 质量阻尼系数:用户需要设置一个浮点数,此数值是计算瑞利阻尼的必要参数。建议使用默认值。
- 模态阻尼:在振动系统中,当振动物体受到外力作用而产生振动时,振动会随着时间逐渐衰减,而模态阻尼是用于描述这种振动衰减的一种阻尼方式。模态阻尼常用百分比表示,可以通过实验测量或计算得到。
- 瑞利阻尼:瑞利阻尼(Rayleigh Damping) 是一种在结构动力学分析中常用的阻尼模型,用于模拟结构的阻尼效应。其模型简单且易于实现,因此在许多工程应用中得到了广泛应用。然而,它也有一些局限性,比如不能准确地模拟所有类型的阻尼效应,特别是当结构具有复杂的阻尼特性时。
- 模态提取空间:此选项是模态空间特有的设置项,主要用于限制动力学计算时提取模态的频率
- 区间下限:频率最小值,用户设置一个浮点数。
- 区间上限:频率最大值,用户设置一个浮点数,数值应比区间下限大。
- 静模态修正:指对结构在静态条件下的模态参数进行修正,以更准确地描述其动态行为。
3.9 时间步&资源
- 用户可在此处设定计算所需的资源和计算时间
- 计算核数:用户可定义仿真计算所需的计算核数。
- 最大计算时间:定义仿真的最大时间,超过该值就会自动停止计算。
3.10结果配置
在此选项卡中,用户可选择输出响应的结果;
- 物理场:可选择输出结果,包括位移、应力(柯西应力、冯米塞斯应力)、应变、力(节点力、节点反力)、速度、加速度。
- 兴趣点结果提取:以折线图形式展示之前所选兴趣点的结果。
3.11仿真结果
用户可在此选项卡中查看仿真计算之后的云图,以及激活的兴趣点的相关结果。